ambf在2023-04-19,美國辦了半天workshop,在模擬上有提供colab上跑,但這是影像segmentation,而不是CRTK自動化
在Ubuntu 20.04上先裝好ROS Noetic,如果有自己的GPU,依序裝ambf,他提供的data,以及跑影像segmentation.
首先是(A)裝ambf(其實跟之前一樣)
# Install ambf dependencies
sudo apt-get install libasound2-dev libgl1-mesa-dev xorg-dev
sudo apt-get install ros-noetic-cv-bridge ros-noetic-image-transport
source /opt/ros/noetic/setup.bash #source ros libraries
git clone https://github.com/WPI-AIM/ambf
cd ambf
mkdir build
cd build
cmake ..
make -j7
之後修改.bashrc檔
gedit ~/.bashrc #open bashrc
插入
activate_ros_env(){
source /opt/ros/noetic/setup.bash #ROS
export PATH=$PATH:~/ambf/bin/lin-x86_64 #AMBF
source ~/ambf/build/devel/setup.bash #AMBF
}
alias ros="activate_ros_env"
記得source一次
. ~/.bashrc
然後開2個terminal,一個執行
ros && roscore
另一個執行
ros && ambf_simulator
之後(B)下載他提供的data
ros ##Assuming you setup the alias in the previous step
cd ~
git clone https://github.com/jabarragann/surgical_robotics_challenge.git
cd surgical_robotics_challenge/scripts
pip install -e .
python -c "import surgical_robotics_challenge; print(surgical_robotics_challenge.__file__)"
cd ~/surgical_robotics_challenge #cd <path-surgical-robotics-challenge>
./run_environment_3d_med.sh
最後(C)跑影像segmentation
cd ~
git clone https://github.com/Accelnet-project-repositories/dVRK-segmentation-models.git
cd dVRK-segmentation-models
pip install -e . -r requirements_basic.txt --user
echo 'export PATH=$PATH:$HOME/.local/bin' >> ~/.bashrc # Add your local bin to path
記得再source一次
. ~/.bashrc
surg_seg_ros_video_record --help
git clone https://github.com/dayon95/AMBFSegmentation.git
然後跑程式
不過最後的這個colab的python的Jupyiter notebook檔案,好像可以直接在Colab跑,完全不須Ubuntu 20.04+ROS Noetic耶,結果前面(A)(B)(C)似乎都是多餘
原本程式是使用training 40 epoches再多2次,我把它加到100,觀察大概要50 epochesr就會收斂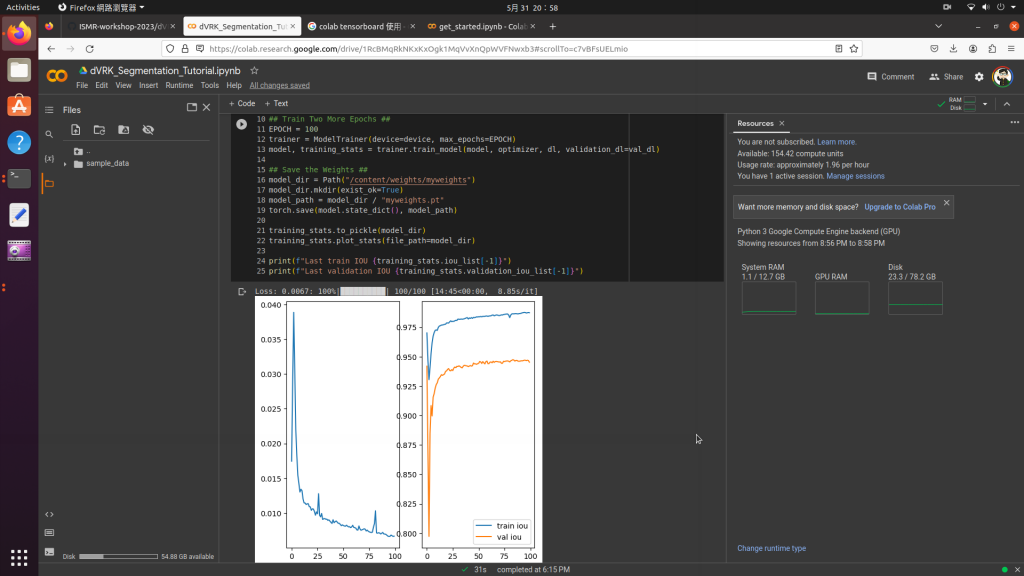
 jaujie
jaujie

 iThome鐵人賽
iThome鐵人賽